5.2 Núcleo e imagen de una transformación lineal.
5.2 IMAGEN DE UNA TRANSFORMACIÓN LINEAL
Sean V, W espacios vectoriales sobre un campo F y sea T ∈ L(V, W). La imagen de T se define como el conjunto
de todos los valores de la aplicación T:
La imagen de una transformación lineal es un subespacio vectorial del condominio.
Sean V, W espacios vectoriales sobre un campo F y sea T ∈
L(V, W). Entonces im(T) es un subespacio de W.
Parte de demostración. Se aplica el criterio de subespacio. Se demuestra que el conjunto
im(T) es cerrado bajo la adición y bajo la multiplicación por escalares, además contiene
al vector cero.
Mostremos que el conjunto im(T) es cerrado bajo la adición. Sean w1, w2 ∈ im(T).
Por la definición de la imagen, existen v1, v2 ∈ V tales que w1 = T(v1), w2 = T(v2). Por
la linealidad de T,
Logramos encontrar un vector x = v1 + v2 tal que T(x) = w1 + w2. Por la definición de la imagen, esto implica que w1 + w2 ∈ im(T).
Criterio de la suprayectividad de una función en términos de
su imagen.
Según la definición, f se llama suprayectiva si Y ⊂ im(f). Pero la contención im(f) ⊂ Y es válida cualquier función f : X → Y . Por lo tanto,
NÚCLEO DE UNA TRANSFORMACIÓN LINEAL
El núcleo de una transformación lineal.
Sean V, W espacios vectoriales sobre un campo F y sea T ∈ L(V, W). El núcleo (kernel, espacio nulo) de T se
define como la preimagen completa del vector nulo:

El núcleo de una transformación lineal es un subespacio vectorial del dominio.
Sean V, W espacios vectoriales sobre un campo F y sea T ∈ L(V, W).
Entonces ker(T) es un subespacio de V .
Sean V, W espacios vectoriales sobre un campo F y sea T ∈
L(V, W). Entonces:

Demostración. ⇒. Supongamos que T es inyectiva. Tenemos por demostrar la igualdad ker(T) = {0V }. Sabemos que la contención {0V } ⊂ ker(T) se cumple para cualquier transformación lineal. Vamos a demostrar que ker(T) ⊂ {0V }.
Para ello, consideremos
un vector arbitrario v ∈ ker(T) y demostremos que v = 0V . Por la definición del núcleo
tenemos que T(v) = 0W .
Por otro lado, sabemos que T(0V ) = 0W . De las ´ultimas dos
igualdades sigue que T(v) = T(0V ). Como T es inyectiva, podemos concluir que v = 0V .
⇐. Supongamos que ker(T) = {0}. Sean u, v ∈ V tales que T(u) = T(v), demostremos
que u = v. Por la linealidad de T,
Esto significa que T(u − v) ∈ ker(T). Luego u − v = 0 y u = v.
Ejemplo:
El núcleo y la imagen de la transformación nula.
La transformación
nula 0V →W : V → W está definida mediante la formula.

Es fácil ver que ker(0V →W ) = V , im(0V →W ) = {0W }.
El núcleo y la imagen de la transformación identidad.
Determine
ker(I) y im(I) de la transformación identidad I : V → V definida mediante la fórmula.
El núcleo y la imagen de la transformación D.
Consideremos el
operador D : Pn(R) → Pn(R), Df = f
0
. Entonces im(A) = Pn−1(F), ker(A) = P0(F).
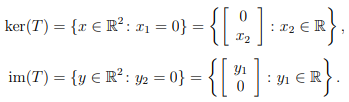
Sea P el
operador de proyección sobre 𝓁₁ paralelamente a 𝓁₂. Entonces ker(P) = 𝓁₂, im(P) = 𝓁₁.

Es fácil ver que
Sean V, W, X espacios vectoriales sobre un campo F y sean
T ∈ L(V, W), U ∈ L(W, X). Demuestre que

En este problema se trata de funciones generales, no necesariamente de transformaciones lineales. Sean f : X → Y , g : Y → Z. Demuestre que:
1. Si la composición gf es suprayectiva, entonces g es suprayectiva.
2. Si la composición gf es inyectiva, entonces f es inyectiva.
A continuación se dejan algunos videos de ejemplo respecto al tema de Núcleo e Imagen de la Transformación Lineal.
Elaborado por.
José Manuel Zambrano Luna.
Dulce María Rangel Alcalá.
Bradley William Dávalos Espinoza.
Luis Felipe Hernandez Soto.

¿Cuál es la definición algebraica del núcleo?
ResponderBorrarNT = {x ϵ V|T(x) = 0}
BorrarDonde x pertenece a V tal que la transformación de x es igual a 0.
¿Qué es el núcleo de una transformación lineal?
ResponderBorrarEl núcleo es un subespacio de V.
Borrar¿Qué es el rango de una transformación lineal?
ResponderBorrarEl rango de la transformación lineal se refiere a la dimensión de la imagen.
Borrarrang(T) = dim(Im))
¿Cómo se calcula la imagen por f de un vector x de coordenadas x= (x1, x2, …, xn) B x= (x1, x2, …, xn)?
ResponderBorrarEn este caso, B se obtiene multiplicando por la matriz asociada a f : Y=A⋅X Y = A · X
Borrar
ResponderBorrar¿Qué es denominado como nulidad?
Se denomina como nulidad a la dimensión del núcleo. null(T) = dim(ker(T))
Borrar¿Qué es la imagen de una transformación lineal?
ResponderBorrarLa imagen de una transformación lineal es un subespacio del codominio.
Borrar